|
Adamya Singh Dhaker Hello! I am a CLS PhD student at ETH Zürich and the Max Planck Institute for Intelligent Systems (Stuttgart), where I am supervised by Dr. Janneke Schwaner (Neuromechanics of Movement Group, MPI) and Prof. Robert Katzschmann (Soft Robotics Laboratory, ETH). I have been awarded the Max Planck-ETH Center for Learning Systems doctoral fellowship (Class of 2025) to work at the intersection of soft and biohybrid robotics, biomechanics and computational modeling. Prior to starting my doctoral studies, I greatly enjoyed my time in sunny Singapore, where I completed my master's degree in mechanical engineering at NUS, and my bachelor's degree in aerospace engineering (with minor in applied physics) at NTU. I was fortunate to do my master's research on octopus arm modeling under the supervision of Prof. Cecilia Laschi and Prof. Gianmarco Mengaldo. I also spent some time as an ETH Robotics Student Fellow at the Soft Robotics Laboratory, ETH Zürich and as a visiting researcher at the MOX Laboratory, Politecnico di Milano. Please feel free to email me if you would like to discuss my research, your research, any potential collaborations or if you have any questions 😊 Also, I love playing (and coaching) tennis! |

|
Research InterestsI'm interested in soft and biohybrid robots, high-fidelity computational modeling and muscle biomechanics. Nature exhibits remarkable embodied intelligence, and I see computational modeling as a powerful tool to create a bridge for knowledge transfer between soft robotics and nature. More specifically, I want to use modeling to understand the embodied intelligence underlying soft biological systems and their biomechanical principles, so that we can use them to inform the design of more lightweight, compliant and mechanically intelligent assistive soft robots. My research up till now has been focused on modeling the octopus arm to understand how its muscle activation and architecture is linked to its deformation. Along with numerical models, I have also worked on understanding the environemntal interactions (fluid dynamics) of an octopus-inspired soft robot arm, along with a touch of computer vision for extracting octopus arm kinematics. With the ETH Soft Robotics Laboratory, I am working on developing 3-D flow solvers for biohybrid robots. |
News
|
Projects | |

|
Octopus arm movements unveiled: a
computational modeling approach to muscle
activation-driven biomechanics
Adamya Singh Dhaker*, Yuchen Sun*, Michele Bucelli, Francesco Regazzoni, Luca Dede', Letizia Zullo, Cecilia Laschi, Gianmarco Mengaldo * represents equal contribution. Under Review Presented previously at RoboSoft 2024, Embodied Intelligence Conference 2024 and WCCM-PANACM 2024 RoboSoft Poster A high-fidelity computational model of the octopus arm, with implementation of all major arm muscle fibers. Muscles are activated by active stresses, and applying experimentally established activation sequences produce stereotypical motions as seen in real octopuses. |
|
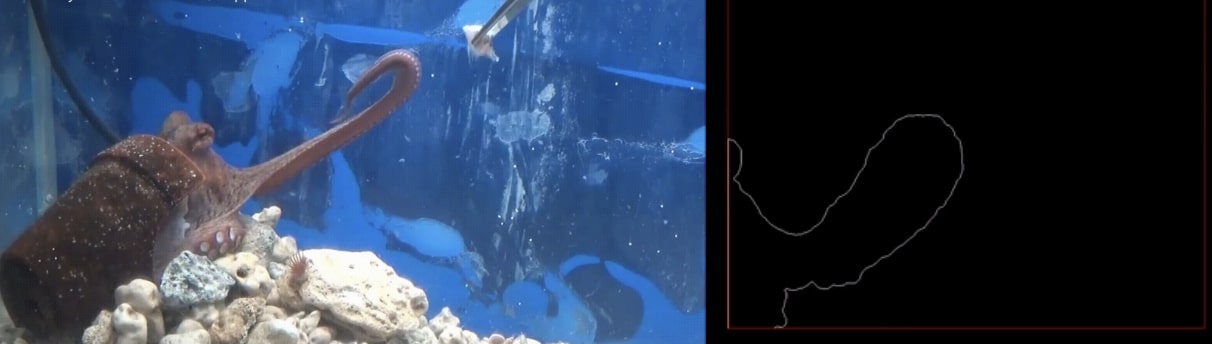
Computer Vision-Based Kinematics Extraction from Octopus Arm Reaching Motion Videos
Adamya Singh Dhaker, Rayner Lim Fang Yuh, Say Yong Lim, Haozheng Zhang, Xie Yiang Ooi, Letizia Zullo, Gianmarco Mengaldo, Cecilia Laschi Internal Technical Report Kinematics of octopus arm reaching follow stereotypical profiles invariant across scales and species, though such data is rarely available in open literature. We developed an automatic, markerless algorithm to segment octopus arms from reaching videos. This algorithm extracts key kinematic data from the segmented videos to provide benchmarks for simulations and experiments. |
|
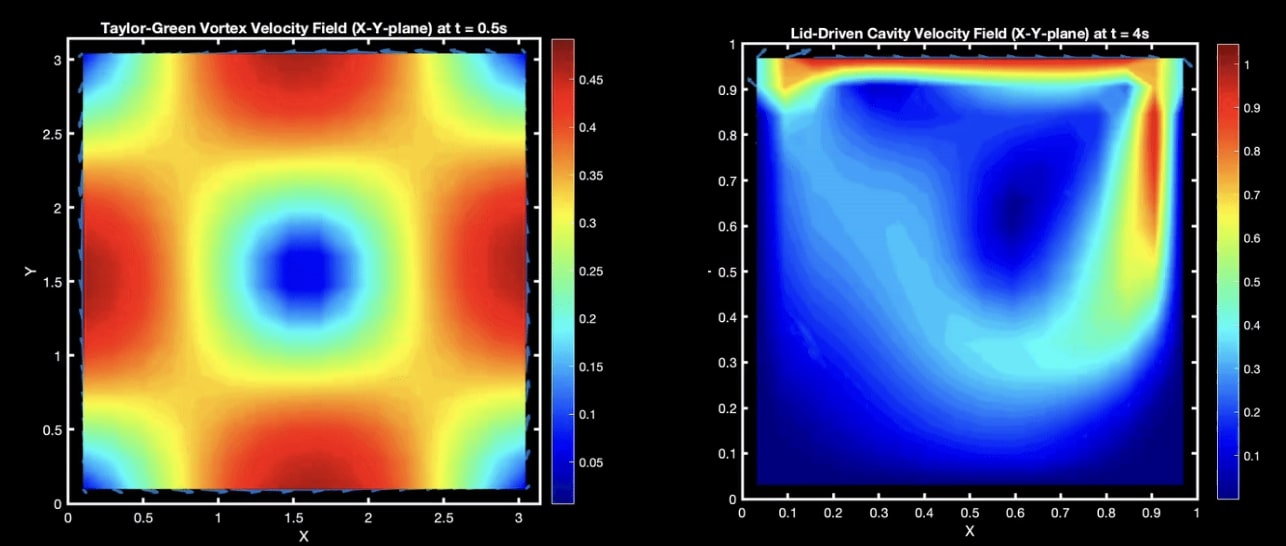
Energy-Minimization-Based Fluid-Structure Interaction for Biohybrid Robots
Adamya Singh Dhaker, Manuel Mekkattu, Mike Yan Michelis, Robert Katzschmann Technical Report Under Preparation Developing a fast, 3-D Eulerian fluid solver to couple with the ETH Zürich Soft Robotics Laboratory's in-house soft body simulation code, tailored for biohybrid robots. Turns out, pressure projection (a.k.a mass conservation) in a Navier-Stokes solve can be treated as an energy minimization problem to advance a fluid-solid solve. |
Miscellanea |
Academic Service |
Reviewer, RoboSoft 2025 |
Teaching |
Teaching Assistant, Soft and Biohybrid Robotics Class, ETH Zürich, Spring 2026
Tennis Coach, Yale-NUS College Tennis Team, 2024-2025 |
Hobbies |
|
|
This website template has been borrowed, with gratitude, from this source code by Jon Barron. |